The rise of autonomous AI agents will fundamentally reshape the app economy, rendering many single-purpose applications obsolete as agents integrate and automate tasks across systems. This forces companies to either become agent-facing APIs or risk irrelevance.
Cultivate "agent empathy" by understanding how models perceive codebases and problems. This skill, combined with a willingness to experiment and "play," is crucial for effectively guiding agents to build and refactor software.
The agentic AI era demands a shift from traditional programming to a builder mindset, where human creativity and strategic guidance become paramount. Investors should seek platforms enabling this shift, and builders must adapt to a world where natural language is the new code.
Robotics is moving towards generalist policies, demanding scalable, high-fidelity evaluation tools that mirror the real world, away from task-specific benchmarks.
Adopt PolaRiS for rapid policy iteration and generalization testing, especially for pick-and-place tasks, leveraging easy environment creation and proven real-to-sim correlation.
PolaRiS provides critical infrastructure for accelerating robot learning, enabling builders to quickly validate policies against real-world performance without prohibitive cost.
AI agents are transforming software development from a manual coding craft into an "agentic engineering" discipline, where human builders orchestrate and guide autonomous AI systems. This shift means the value moves from writing boilerplate code to designing agent-friendly architectures and providing high-level strategic direction.
Embrace agentic engineering by learning to "empathize" with AI models, understanding their context limitations, and guiding them with concise, clear prompts. Experiment with open-source agents like OpenClaw to build new tools or automate existing workflows, focusing on the what and why rather than the how.
Personal AI agents will commoditize many existing apps and services, forcing companies to either become agent-facing APIs or risk obsolescence. Investors should identify platforms and infrastructure that enable agent interoperability, while builders should focus on creating agent-native experiences and tools that augment human creativity, rather than replicating existing app functionality.
Robotics is moving beyond isolated tasks to generalist policies, demanding scalable, correlated evaluation methods. This mirrors the LLM world's need for diverse, generalization-focused benchmarks.
Utilize PolaRiS's open-source tools and Hugging Face hub to quickly create and share new evaluation environments. This crowdsourcing approach accelerates community-wide progress in robot policy development.
Investing in tools like PolaRiS that bridge the real-sim gap with high-fidelity visuals and minimal sim co-training is crucial. This enables faster policy iteration and more reliable real-world deployment for the next generation of generalist robots.
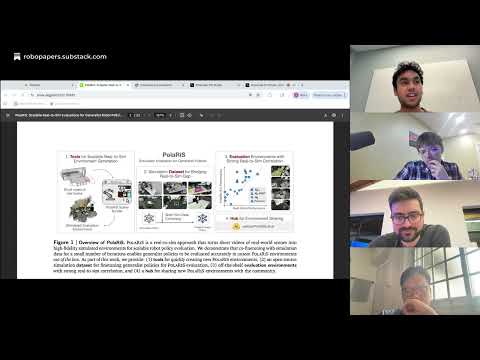
The macro shift: Generalist robot policies need generalist evaluation. The shift is from hand-crafted, task-specific sim environments to easily generated, real-world-correlated simulations that test zero-shot generalization, mirroring the rapid benchmark development in LLMs. This allows for a holistic understanding of policy capabilities across diverse, unseen scenarios.
The tactical edge: Adopt PolaRiS for rapid policy iteration. Builders should use its browser-based scene builder and Gaussian Splatting to quickly create new, diverse evaluation environments from real-world scans, then fine-tune policies with small, unrelated sim data to achieve high real-to-sim correlation. This accelerates development cycles and reduces costly real-world testing.
The future of robotics hinges on scalable, trustworthy evaluation. PolaRiS provides a critical tool today to bridge the sim-to-real gap, enabling faster, more reliable development of generalist robot policies. Expect a community-driven explosion of benchmarks, pushing robot capabilities faster than ever over the next 6-12 months.
The robotics community needs to move beyond task-specific benchmarks with provided training data towards a diverse suite of generalization-focused evaluations, mirroring the LLM ecosystem. PolaRiS provides the tools to crowdsource and rapidly deploy these new benchmarks, fostering a more holistic understanding of robot policy capabilities.
For robot policy developers, prioritize tools like PolaRiS that offer high real-to-sim correlation with minimal setup. Leverage its browser-based scene builder and the "visual vaccination" co-training method to quickly iterate on policies for pick-and-place and articulated object tasks, then validate on real hardware.
Scalable, correlated simulation is the missing piece for accelerating generalist robot AI. Over the next 6-12 months, the adoption of tools like PolaRiS will enable faster policy iteration, more robust benchmarking, and ultimately, a quicker path to deploying capable robots in diverse, unstructured environments.
The robotics community is moving from hand-crafted, task-specific simulations to generalist policies that demand scalable, real-world correlated evaluation. PolaRiS enables this by making it cheap and easy to create diverse, high-fidelity sim environments from real scans, allowing for generalization testing akin to LLM benchmarks.
Implement PolaRiS for rapid policy iteration. Use its real-to-sim environment generation and minimal, unrelated sim data co-training to quickly validate robot policies against real-world performance, reducing costly physical robot time.
PolaRiS offers a critical infrastructure upgrade for robot AI development. By providing a fast, reproducible, and highly correlated simulation environment, it allows builders to iterate on generalist robot policies at software speed, significantly de-risking and accelerating the path to real-world deployment and broader robot capabilities over the next 6-12 months.
The drive for generalist robot policies demands scalable, reliable evaluation. PolaRiS pushes robotics toward the community-driven, diverse benchmarking common in LLMs, accelerating the path to truly capable robots.
Adopt PolaRiS for rapid policy iteration and generalization testing. Leverage its easy environment creation and proven real-to-sim correlation to quickly validate new robot behaviors before costly real-world deployment.
PolaRiS is a critical tool for any team building robot policies. It cuts evaluation costs, speeds up development, and provides a trustworthy signal for real-world performance, making it a must-have for your robotics roadmap over the next 6-12 months.
Builders should prioritize hybrid real-to-sim evaluation tools like PolaRiS for rapid policy iteration.
Use minimal, out-of-domain sim data to align policies to the simulation environment, ensuring your sim results accurately predict real-world performance.
Investing in tools that democratize benchmark creation and ensure strong real-to-sim correlation will accelerate robot policy development.
1. Despite bearish sentiment, historical patterns and institutional interest suggest the current downturn may be a temporary pullback in a broader bull market.
2. Institutional players are increasingly interested in crypto, viewing the current market conditions as an opportunity rather than a deterrent.
3. Regulatory clarity is emerging, potentially benefiting tokens with strong fundamentals and reshaping market dynamics.
1. Misinformation and conspiracy theories continue to challenge market makers like Wintermute, highlighting the need for better education and transparency in crypto markets.
2. The strategic execution of OTC sales is crucial for minimizing market impact, yet often misunderstood by the broader market.
3. Positive regulatory developments could unlock significant value in utility tokens, fostering innovation and growth in the crypto ecosystem.